













 – посадка і догляд за квіткою")














")





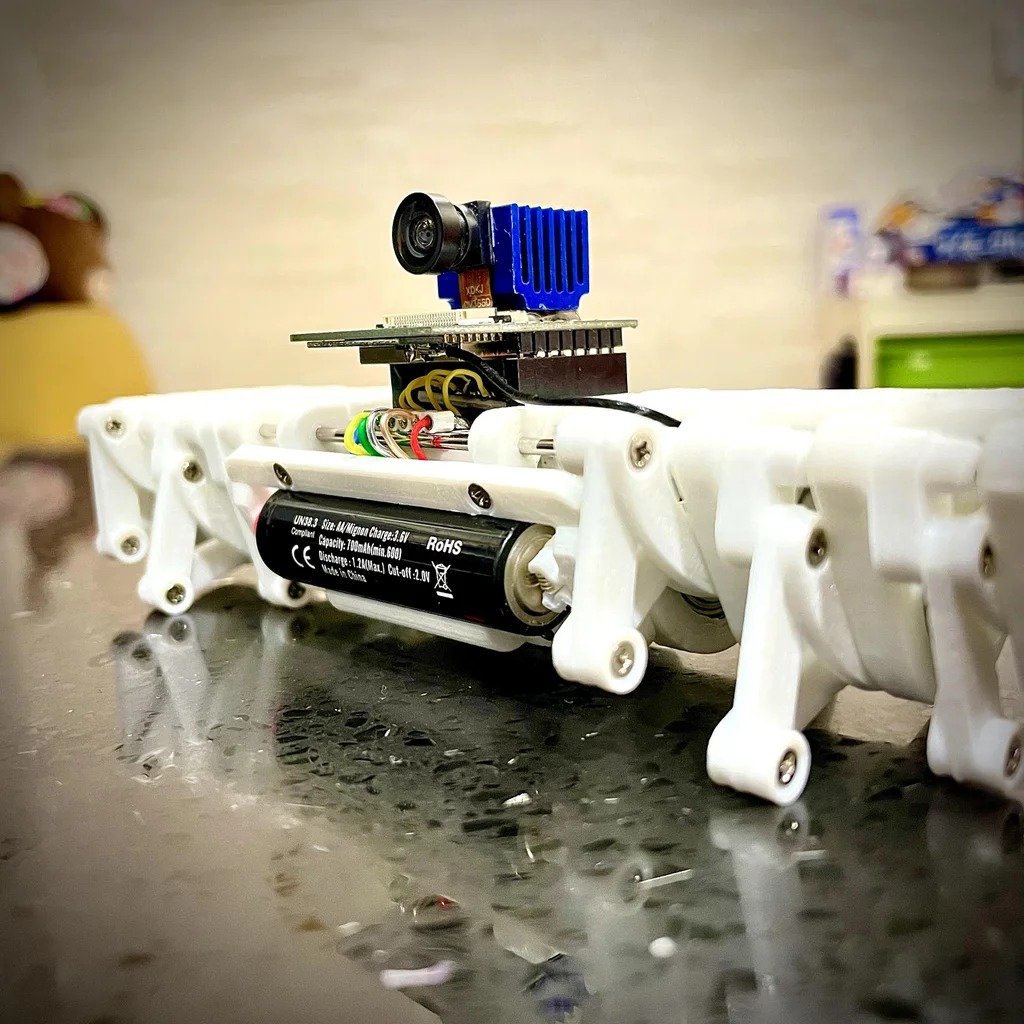
Strider-це механічний робот, розроблений вейдом вейглом. Strider еволюціонував з багатьох моделей дизайну, тому він дуже добре ходить. Основні деталі для нього надруковані на 3d-принтері, а працює пристрій під управлінням плати esp32.давайте подивимося два невеликих відео з демонстрацією його роботи.
Отже, для складання даного робота знадобляться наступні
Інструменти та матеріали:-esp32-cam-mb (в комплекті з камерою):-акумулятор із зарядним пристроєм lifepo4 14500:-двигун n20 3v 200rpm:-drv8833 2-канальна плата модуля драйвера двигуна постійного струму:-роз’єм з 8 контактами – 2 шт:-підшипник 6702zz – 8 шт:-гвинт m2 з плоскою головкою довжиною 6 мм – 100 шт:-стрижні діаметром 2 мм довжиною 155 мм – 2 шт:-стрижні діаметром 2 мм довжиною 15 мм – 6 шт:-3d-принтер:-гравер;-викрутка;-паяльні приналежності;-монтажна плата;
Крок перший: strandbeest або striderесть кілька конструкцій робота пересувається подібним чином. На фото нижче можна порівняти механіку ходьби даних моделей.
Якщо strandbeest добре пересувається тільки на рівній твердій поверхні, то для strider не проблема невеликі перешкоди і м’яка поверхня.це добре видно на двох відео.
Крок другий: акумуляторця конструкція має два слоти для батарейок 14500 (розмір aa).esp32-cam вимагає харчування 3,3 в, вбудований стабілізатор напруги (ams1117) приймає максимум 15 в. Двигуни n20 можуть харчуватися від 3 – 12 в. Для живлення драйвера мотора drv8833 потрібно 2.7 – 10.8 в. Провівши порівняльний аналіз різних типів батарей 14500 майстер з’ясував:nimh акумулятор, 2 x 1,0 – 1,25 в = 2 – 2,5 в, недостатньо енергіілітій-іонний акумулятор, 2 x 2,5 – 4,35 в = 5 – 8,7 в, може відповідати вимогам до живленняаккумулятор lifepo4, 2 x 2,0–3,65 = 4,0-7,3 в, задовольняє вимоги до живлення і забезпечує кращу безпеку акумуляторатаким чином, можна використовувати дві батареї 14500 li-ion або lifepo4. Батарея lifepo4 краще. Якщо ви вибираєте літій-іонний акумулятор, не забудьте вибрати акумулятор з вбудованою захисною платою або встановити схему захисту.
Крок третій: двигуніцей strider використовує 2 маленьких мотор-редуктора n20. Такий мотор-редуктор має кілька доступних передавальних чисел. Майстер тестував 3 передавальні числа від 3 при 100 об / хв, від 200 до 500 об / хв і 3 в при 500 об / хв. Останній редуктор працює дуже швидко, але для кращого огляду камери в реальному часі потрібна стійкість ходьби, тому він рекомендує 3 в при 200 об / хв.
Крок четвертий: інші деталидля складання коленвала майстер використовує 8 підшипників 6702zz, внутрішній діаметр – 15 мм, зовнішній діаметр – 21 мм, ширина – 4 мм.
Для простоти у всіх розроблених з’єднаннях використовуються гвинти одного розміру. Це гвинти з плоскою головкою m2 довжиною 6 мм, для складання цього робота потрібно 72 штуки.
Також в збірці використовується стрижень діаметром 2 мм.придбавши стрижень довжиною 200 мм можна розрізати його на необхідну довжину і кількість.
Крок п’ятий: 3d-друкфайл для друку деталей можна завантажити тут. Кінець імені файлу ” _x2 ” означає друк 2 копій … “_x12” означає друк 12 копій і т.д.
Деталі, надруковані на 3d-принтері, можуть не друкувати ідеальні круглі отвори. Після друку майстер допрацьовує отвори свердлом 2,1 мм.
Крок шостий: сборкапісля друку деталей можна приступити до складання робота.використовуйте 4 гвинти, щоб з’єднати разом деталі core1, core2a і core2b.
Встановіть двигуни. Зверніть увагу на те, що 2 двигуна вирівняні під кутом 90 градусів.
Вставте тонкостінний шарикопідшипник у корпус 2. Вставте вісь 3 в тонкостінний шарикопідшипник.повторіть крок для другого вузла.
Встановіть вісь 3 на вал двигуна.
За допомогою 8 гвинтів прикріпіть кришку 1 і кришку 2 до корпусу. Протягніть пару стрижнів довжиною 155 мм і діаметром 2 мм через отвір в корпусі.
Використовуйте гвинт для з’єднання ніжки 2, ніжки 3 і ніжки 1 разом.використовуйте гвинт для з’єднання ніжки 3 і ніжки 4 разом.повторіть кроки, щоб зробити другу ногу.використовуйте 2 гвинти, щоб з’єднати дві ноги 2 і 4 разом.зберіть 6 пар ніг.
Встановіть стрижень 15 мм в вісь 3.встановіть ноги на стрижні.
Вставте тонкостінний шарикопідшипник у корпус 2. Вставте вісь 2 в тонкостінний шарикопідшипник.зробіть чотири таких вузла.
Встановіть вузол на вісь і зафіксуйте гвинтом.
Повторіть установку ніг. З кожного боку по 3 пари ніжок, кожна пара ніжок зміщує колінчастий вал на 60 градусів.
Вставте тонкостінний шарикопідшипник у корпус 1.вставте вісь 1 в тонкостінний шарикопідшипник. Повторіть кроки для другої деталі.
Вирівняйте отвір осі 1 і протягніть через стрижень 15 мм. Закріпіть кінець корпусу гвинтами.
Встановіть на тримач проводу, підключення послідовне. Рекомендується використовувати червоний і синій провід для позначення позитивного і негативного полюса акумулятора.
Протягніть дроти і закріпіть тримачі.
Крок сьомий: програмне забезпечення arduino завантажіть та встановіть arduino ide.дотримуйтесь інструкцій по установці, щоб додати підтримку esp32.дотримуйтесь інструкцій по установці, щоб встановити завантажувач файлової системи arduino esp32.завантажте fsbrowserplus.імпортуйте бібліотеки в arduino ide. (меню “скетч” в arduino ide ->”включити бібліотеку” ->” додати бібліотеку .zip ” ->вибрати завантажений zip-файл) завантажте останні бібліотеки espasyncwebserver.імпортуйте бібліотеки в arduino ide. (меню “скетч” в arduino ide ->”включити бібліотеку” ->” додати бібліотеку .zip “->вибрати завантажений zip-файл)
Крок восьмий: конфігураціятип ” fsbrowserplus.ino ” розкоментуйте свою модель камери приблизно в рядку 28 і закоментуйте всі інші. Наприклад, camera_model_esp32_cam_robot для цього робота-камери strider.
Показати / приховати текст
Моторні штифтиcamera_model_esp32_cam_robot також визначає висновки двигуна в ” camera_pins.h”:
Показати / приховати текст
Світлодіодний штифтсветодіод безпосередньо управляється веб-інтерфейсом gpio api. В даному випадку це gpio 4. Можна змінити висновок світлодіода приблизно в рядку 616 файлу ” camerarobot.htm”.
const query = `${basehost}/gpio?pin=4&val=${value}`;
Крок дев’ятий: завантаження кодапідключіть esp32-cam до комп’ютера. Відкрийте arduino ide відкрийте fsbrowserplus.іпозмініть ssid і пароль на свої власні облікові дані точки доступу wifiвиберіть board і “esp32 dev module «в меню»tools”.у меню “tools” виберіть ” default 4mb with fat (1.2 mb app/1.5 mb fatfs)”.натисніть кнопку “завантажити” в arduino ide.виберіть ” esp32 sketch data upload “в меню” tools”.виберіть тип fs для “fatfs «і натисніть кнопку»ок”.
Крок дев’ятий: платаотрежьте друковану плату 10 x 10 отворів. Просвердлите 4 отвори в c3, h3, c8 і h8.
Проводить монтаж за наступною схемою (при монтажі краще використовувати довгі дроти):
battery ->switch ->esp32-cam ->drv8833 ->motor+ve pole ->pin 1 pin 2 ->5v ->vcc-ve pole ->gnd ->gnd gpio 12 ->in1 gpio 13 ->in2 gpio 14 ->in3 gpio 2 ->in4 out1 ->left +ve out2 ->left-ve out3 ->right-ve out4 ->right +ve short j2
Далі потрібно прикрутити плату до робота.
Підключіть камеру. Наклейте радіатор на кардрідер sd. Наклейте модуль камери на радіатор.
Встановіть батарею.
Крок десятий: робота пристрояfsbrowserplus працює в подвійному режимі ap + sta.якщо ви ввели свою точку доступу wifi і пароль, ви можете безпосередньо перейти за адресою http: / / fsbrowserplus.local, щоб отримати доступ до fsbrowserplus, але він обмежений зоною покриття точки доступу wifi.якщо робот за межі зони покриття точки доступу wi-fi, просто виконайте пошук точки доступу wi – fi під назвою ” fsbrowserplus» і введіть попередньо визначений пароль в код для підключення. Після підключення відкриється веб-сторінка captive portal. Потім виберіть ярлик camera robot.
деякі виробники реалізують esp32-cam з різними варіантами антен. Зовнішня антена може поліпшити продуктивність потокової передачі відео з камери. Джерело (source)













{kind=link}